

一、illustrate
The output power of the company's EP100-5A is 2.5KW, and it supports 3 control methods of position, speed and torque, and the maximum can be adapted to 27NM5.5KW motor, and the rated speed of the motor reaches 2000 rpm.
Large screen making machine, as shown below:

The machine tool spindle is a disc, the horizontal Z axis slowly pulls outward, from the figure can be seen that the spindle has a certain load, the requirements for motor speed are not high, the error requirements during processing are within 0.1MM, for this high precision, with a certain load, the control mode should choose the position control mode, the input mode can use pulse plus symbol, the requirements for the numerical control system are that the spindle acceleration and deceleration time should be appropriate, calculate the gear ratio, etc.
The numerical control system sets the spindle acceleration and deceleration time, the number of pulses per revolution, and the proportion of the reducer is set appropriately to ensure that the spindle runs according to the expected value.
二、connection
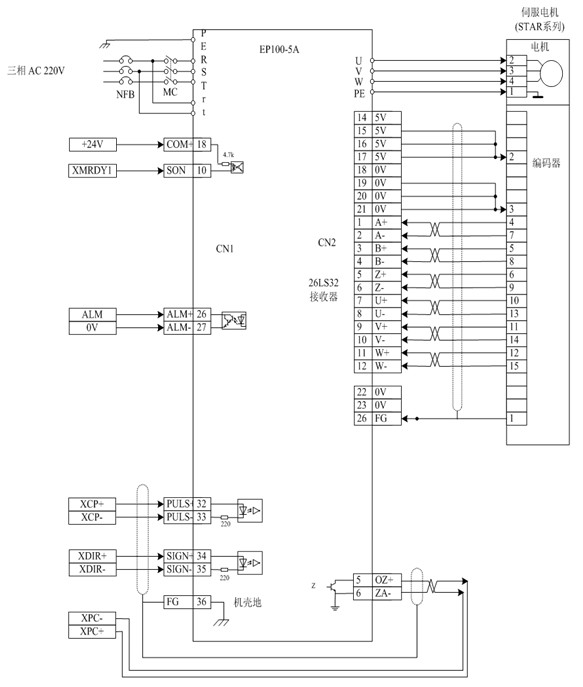
The servo drive and the system wiring can be controlled according to the position in the manual:
The basic wiring is as follows:
三、Parameter settings
|
功能代码 |
代码名称 |
设定参数 |
使用说明 |
|
PA-1 |
型号代码 |
2A-30 |
同伺服电机相匹配 |
|
PA-4 |
控制方式选择 |
0 |
位置控制 |
|
PA-5 |
速度比例增益 |
150 |
设置值越大,则刚度越大,过大容易出现振荡 |
|
PA-6 |
速度积分时间常数 |
20 |
设置值越小,则刚度越大,过小容易出现超调 |
|
PA-9 |
位置比例增益 |
100 |
设置值越大,则刚度越大,过大容易出现振荡或超调 |
|
PA-12 |
位置指令脉冲分频分子 |
1 |
设置相应值可以很方便的与各种脉冲源相匹配 |
|
PA-13 |
位置指令脉冲分频分母 |
1 |
设置相应值可以很方便的与各种脉冲源相匹配 |
|
PA-14 |
位置指令脉冲输入方式 |
0 |
设置与上位机相应的脉冲输入方式,默认为脉冲+方向 |
|
PA-20 |
驱动禁止输入无效 |
1 |
屏蔽限位功能 |
|
PA-53 |
低4位输入端子强制ON控制字 |
0001 |
强制使能 |
四、summary
Our company EP100-5A servo drive, suitable for machine tools with a certain load, servo drive has triple overload function, to meet all the conditions for spindle servo, with efficient performance, high power, good cost performance, favored by the majority of manufacturers.







 Contact us
Contact us
 CRM system
CRM system
 Online service
Online service
 Official wechat
Official wechat

