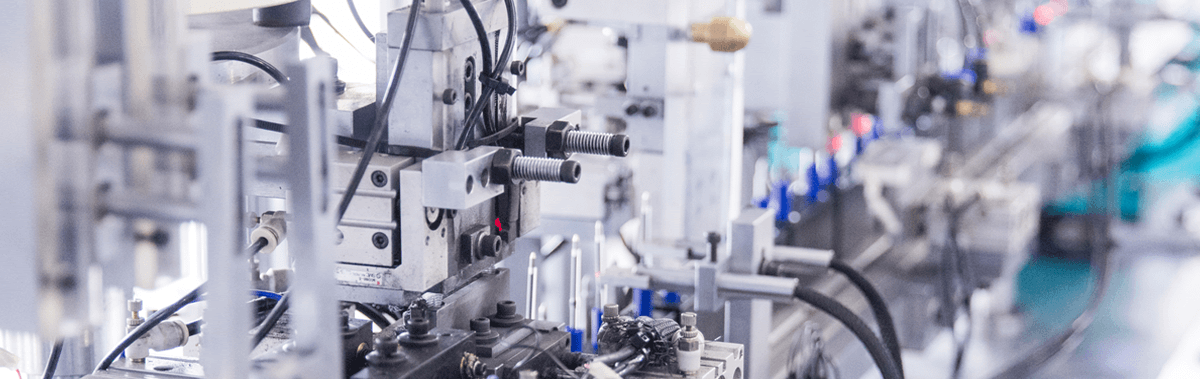
一、Application introduction
In the servo motor production process encoder installation is a key process, installation accuracy directly affects the use of the motor, to Meixin Electric servo drive as an example, the purpose of the encoder to zero is to make the motor U phase axis and encoder Z phase signal offset angle for the parameter P833 (encoder zero offset angle) aligned, workers install the encoder to detect the encoder zero point electrical angle in real time, after the installation is completed to high-speed forward and reverse to detect the tightness of the encoder, but also to detect whether the encoder can count. The general solution is to issue instructions through PLC or directly operate the servo drive keyboard, which has the disadvantages of unintuitive and cumbersome operation, combined with the MF8000 series man-machine interface macro instructions and the auxiliary function code of the meixin servo drive, it can save the PLC and make the whole operation simple and intuitive.
二、System design
1. The servo drive communicates directly with the man-machine interface, and the man-machine interface sends macro instructions to the servo drive to complete the operation, and the servo accepts the man-machine interface command in the speed mode to change the speed and direction in real time.
2. MF8000 man-machine interface features: using ARM-Coter processor, motherboard three-proof paint treatment, high resolution, energy saving and environmental protection.
3. Support U disk storage and download, powerful expansion ability, new configuration software, rich image library. 2.1 Project difficulties
1. The servo drive should have a specific function code, and the drive supports internal control and needs to run stably for a long time.
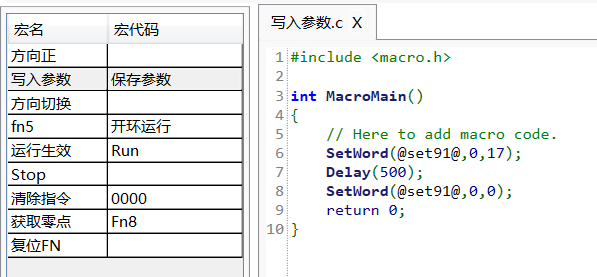
2. The man-machine interface should be edited by macro programs.
2.2 Project implementation
Structure diagram: 
1. Ensure the normal communication between the man-machine interface and the servo drive, and develop auxiliary function codes such as zero point, return, zero register, and open-loop operation.
2. The use and interface design of human-machine interface reading and writing functions.
三、Apply effects










 Contact us
Contact us
 CRM system
CRM system
 Online service
Online service
 Official wechat
Official wechat

