

Abstract: This paper mainly introduces the application scheme and electrical solution of EP3E servo drive in 6-joint industrial robot loading and unloading in machine tools, and through test verification, this servo can well achieve the application indicators of 6-axis robot.
1、overview
Nowadays, in the CNC machine tool processing process of many parts, the parts processed in the first process should be removed first, and then the newly machined surface should be used as the positioning reference to complete the second process processing on another tooling or on another table in the same table. Usually, the part is flipped and rotated at a certain angle, and then translated and loaded to another tooling for processing, so that the entire part is processed in order. Sometimes multiple machining centers are placed in one line, sometimes face-to-face or any combination of the two to save space. Some use the same machine tool for processing, and some use different types of machine tools to complete the processing of the entire part. At this point, the part must be flipped and rotated as it is loaded from one fixture to another. While being flipped and rotated, its position also changes. At this time, the way of application is to install a 6-axis articulated robot on a large linear motion track, it is a good solution to the above process actions, in the era of increasing labor costs, this technology is widely used in machine tool loading and unloading and handling and other industries, with the development of advanced manufacturing technology, 6-axis robots will have very good development prospects, but the current market 6-axis robots often purchase foreign high-end servo systems, resulting in its high price, The use of Meixin's EP3E servo drive and electrical part can control the price well, and can operate stably and efficiently, to achieve cost-effective industrial robot industry solutions, while reducing production costs, improving production efficiency and increasing competitive advantage.
2、Industrial 6-axis robots and machine tools
The 6-axis robot mechanical body in this project is made of Kawasaki's mature mechanical body, as shown in Figure 1, which can realize high-precision pick-and-place operations in three-dimensional space, and has the characteristics of high precision, good reliability and strong ease of use, and can be used in assembly, handling, welding, spraying, packing and other fields. In the face of domestic industrial robot users who are still in the development stage, the use of an industrial robot first considers the cost, if the cost is higher than the current cost of manpower, it will cause 6-axis industrial robots in the market is difficult to promote, but the use of Meixin's high-performance bus servo drive EP3E with B&R's X20 controller through the Ethernet PowerLink bus is a good solution to the 6-axis robot performance and price problems.
The machine tool is HEADMANT55, the numerical control system is SIEMENSSINUMERIK828D, and the main process is to mill the end face of the servo motor box. The cooperation communication between the CNC machine tool and the controller is triggered by IO signal, which can quickly complete the matching action of loading and unloading between the robot and the machine tool, as shown in Figure 2.

Figure 1 6-axis robot body
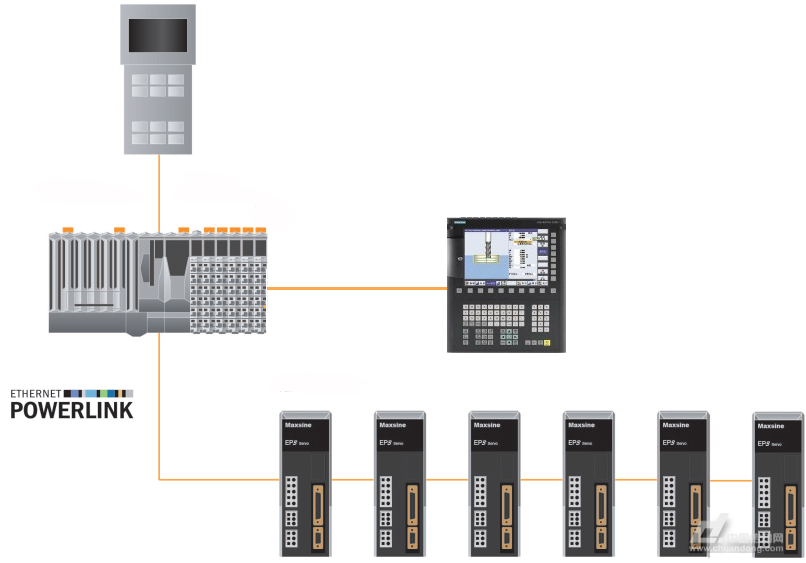
Figure 2 Composition diagram of 6-axis robot control system

Figure 3 6-axis robot control cabinet and teach pendant
3、Control system
The 6-axis industrial robot is connected by the B&R X20 controller as the upper controller, the PowerLink bus type EP3E servo drive, and the teach pendant is connected by the EthernetPowerLink bus to run at high speed and stably, as shown in Figure 3 above.
3.1 High-performance higher-level control system
B&R X20 controller integrates PLC, motion control, measurement technology and robot forward and reverse solution algorithm on the same control platform, which can realize the application of general robots, achieve the flexible configuration of changing the industrial robot body without changing the control system, and have certain advantages in multi-functional applications, recovery and utilization. At the same time, B&R's EthernetPowerLink bus technology has low jitter and optimizes synchronization between the PLC and motion control, thus increasing the accuracy and speed of the system.
3.2 Cost-effective servo drives
EP3E servo drive is one of the first servo drives in China to support EthernetPowerLink bus type launched by Wuhan Meixin Electric Technology Co., Ltd., which can achieve perfect compatibility with B&R's superior PowerLink bus and give full play to the best performance of PowerLink. EthernetPowerLink is an open source technology that is one of the industrial real-time Ethernet networks in the field of automation. The EP3E integrates a dual-port hub for cascading servo drives, supporting any combination of network topologies.
EP3E series servo drive can reach 100Mbps communication rate, node transmission distance is 100m, servo drive refresh speed is the fastest 100us cycle cycle, so that the servo drive has high-speed real-time response capability; The EP3E servo drive is equipped with a 17-bit singleturn or multiturn encoder (optional 20-bit singleturn or multiturn encoder) can calmly cope with high-speed and high-precision positioning, shaftless synchronous transmission, electronic gear, electronic cam and other applications.
3.3 EP3E communication features:
1. Communication protocol: CANopenover, POWERLINK, DS301
2. Communication cycle time: 100μs cycle multiple
3. Process data channel: 2RxPDO, 2TxPDO, 32bytes/PDO
4. Service data channel: 1SDO
5. Synchronous jitter: <1μs
6. Position control: 100μs
7. Operation mode: Profileposition Mode; Homing Mode; Cyclic Synchronous Velocity Mode; Cyclic Synchronous Position Mode
4、Robot performance evaluation
The performance requirements of this 6-axis robot mainly refer to the maximum operating frequency when the robot is grasping standard workpieces, the robot body runs stably and the positioning error is within a certain range. In the actual robot debugging process, EP3E default when the motor of the 6-axis robot has some abnormal noise and enabling brake delay and other problems, through the parameter adjustment of EP3E to achieve perfect elimination of the above problems to achieve smooth operation, to achieve the use of foreign high-end servo system performance indicators, such results can fully prove that EP3E has the ability to replace foreign high-end servo system.
5、epilogue
Through this test with the machine tool, the data communication between the Meixin servo drive EP3E and the B&R controller is realized through the PowerLink bus to complete six-axis linkage, circular interpolation, and multi-axis interpolation. It fully verifies that the performance indicators of EP3E high-performance servo system can fully meet the strict requirements of 6-axis robot multi-servo system, thereby replacing foreign high-end servo systems, and also realizing the localization of key components of robots, reducing the production costs of domestic robot manufacturers, and providing the competitiveness of their products in the market.







 Contact us
Contact us
 CRM system
CRM system
 Online service
Online service
 Official wechat
Official wechat

