The application of EP1C Pro in the simulation driving test platform
2022-03-09
一、Application introduction
The driving test simulation platform is controlled by the main ECU integrated CAN bus, and consists of steering mechanism (including steering wheel assist servo unit), power control system (electric cylinder servo motion platform), brake system, gear, and virtual driving school venue AR.
China's subject two exam mainly has the following items: uphill start, right angle turn, S bend, reverse into the warehouse, side parking. The third subject is mainly clutch gear, brake control, and avoidance of external signal signs.
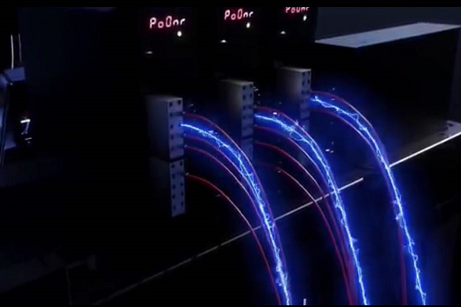
The platform can simulate the process of starting clutch and brake cooperation of manual transmission cars, as well as the sense of direction and horizontal position before and after going up and down the ramp, turning and entering the garage, the steering wheel has real torque feedback, and the servo electric cylinder platform also has corresponding driving force feedback, and realizes the virtual environment real learning experience with scene AR.
In the future driving school, with the popularization of the simulation platform, subjects two and three can be fully practiced without many people being assigned a car, safety is greatly guaranteed, and theoretical knowledge can also be combined with practice.

二、Process requirements
1. The main steering wheel motor can automatically return to the zero position after operation, and can simulate force feedback and directional assistance when rotating (high-end version)
2. Using CANopen bus control, the main control ECU load is low, and it is well compatible with the automotive CAN bus control loop
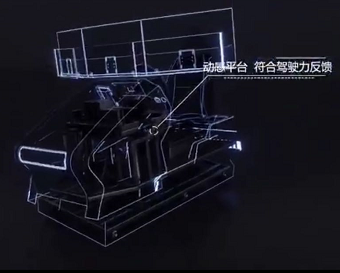
3. The servo-electric cylinder motion platform can simulate the angle of upward and downhill slope, the real vibration of the car body when crashing, braking and stalling
4. Simulate in full accordance with the scoring standards of subjects 2 and 3 in China, including the entire control system (lights, wipers), simulated AI teaching and virtual AR scene support, and real road test feedback
三、System scenario
1. The control system adopts ARM single-chip microcomputer development board (CANopen master scheme) + 3 EP1C Pro servos (motor 60GSL01330)
2. The servo power section covers 100W~7.5kW


四、Scenario advantages
1. The servo responds quickly, fully reflecting the sense of driving control
2. The bus wiring is convenient, high synchronization is not required, and the position loop is driving, which greatly reduces the load of the main station
3. Using DS402 state machine architecture, the compatibility of the protocol with the standard CANopen master is guaranteed
4. The host computer of the TYPEC interface can support finding fault points, recording functions, and remote firmware upgrades
五、Device description EP1C Pro
1. Voltage: AC 220V/380V
2. Power: 0.1kW~7.5kW
3. Communication interface: CANopen, RS485
4. Control mode: set value position mode (Profile Position), return to zero mode (Home), set point torque mode (Profile Torque)
5. Support 23-bit single/multiturn absolute encoder, support BISS-C code disk
6. It adopts the new ARM architecture CORTEXM4 hardware platform and more optimized software control algorithm, and adds functions such as acceleration observer, model tracking and friction compensation










 Contact us
Contact us
 CRM system
CRM system
 Online service
Online service
 Official wechat
Official wechat

