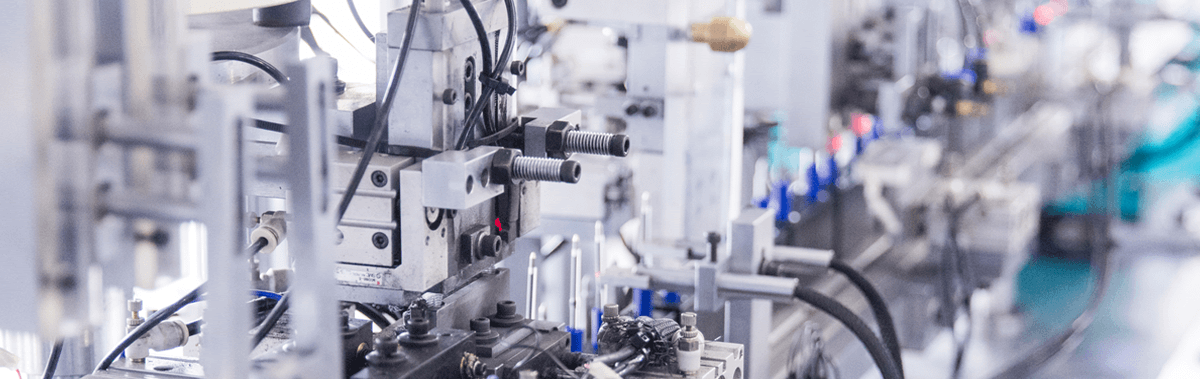
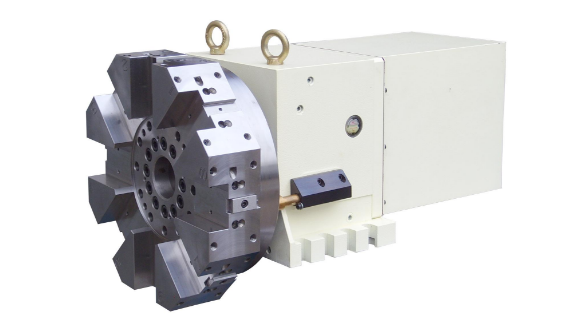
Servo tool holder is the realization mechanism of CNC machine tool automatic tool change, to realize the rotation of the cutterhead on the tool holder and the movement of open positioning, positioning and clamping of the cutterhead, to achieve the automatic conversion of the tool, with the core content of CNC machine tools such as transmission mechanical structure, electrical forward and reverse control, PLC programming control, etc., which is what every learning CNC machine tool structure must master, with comprehensive characteristics of machinery and electrical.
EP3M tool holder drive is a servo drive (referred to as drive) specially designed to drive servo tool holders. It can drive the tool holder servo motor according to the tool changing requirements of the CNC system on the CNC machine tool to control the servo tool holder for manual debugging tool change, automatic tool change, tool holder back to zero and other actions, and can carry out the current tool position code feedback, tool change fault alarm output, which greatly improves the efficiency of CNC machine tool holder control.
二、Process requirements
1. High precision, using high resolution absolute value encoder
2. High reliability, frequent tool change and stability
3. High efficiency, fast tool changing speed and short time
4. It has the function of tool position compensation
三、System scenario
1. The servo power section covers 0.1kW~15kW
2. It can support a variety of tool bits, and the number of tool bits is set through the drive parameters
3. The tool holder timing diagram can be provided, and any CNC system manufacturer or PLC manufacturer can match and use it according to the timing diagram
四、Scenario advantages
1. The tool change time is adjustable, and the adjustment is simple and flexible
2. Long-term continuous tool change operation is stable
3. The tool position compensation function has good effect
4. The tool holder program is programmable
五、Device description EP3M
1. Voltage: AC 220V/380V
2. Power: 0.1kW~15kW
3. Maximum control tool position: 32 knives
4. Tool position feedback code: 5-bit BCD code
5. Working mode: 1. Button; 2. Set the origin; 3. Tool holder positioning
6. Braking mode: energy consumption braking, built-in braking resistance
7. Control input: 1. Knife number instruction coding; 2. Servo control
8. Control output: 1. Tool number position coding; 2. Servo status
9. Communication interface: USB parameter reading and writing, MODBUS communication
10. Position feedback: standard Tamagawa 17-bit absolute encoder
11. Support motor type: M/G series rotary servo motor, support third-party motor adaptation












 Contact us
Contact us
 CRM system
CRM system
 Online service
Online service
 Official wechat
Official wechat

