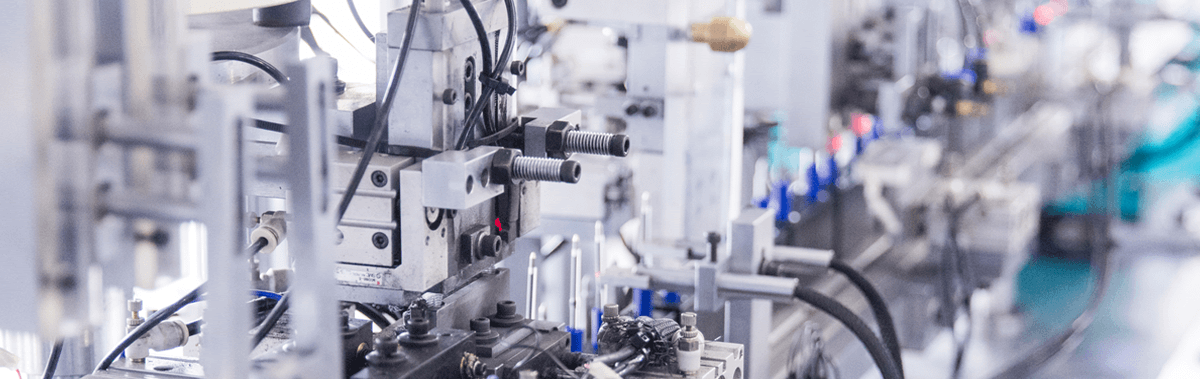
In the application, the automotive body process requires that after the sheet metal parts are formed and before painting, special tooling is used to apply NVH anti-irrigation glue to the body sheet metal parts, and the robot of the handling process and welding process is used to form a body parts processing production line. In the body shop with a very compact production line, the spraying process is completed in collaboration with other large robots.
二、Process requirements
1. 5~10kg load capacity, complementary to Faunc large-scale robot collaborative operation process
2. Use EtherCAT bus control
3. 7×24 hours of uninterrupted operation
4. Perfect anti-collision mechanism, all-aluminum fuselage lightweight operation
三、System scenario
1. The control system adopts KEBA robot controller CP505A + 6 sets of EP3L-S joint servo to integrate into a robot body
2. The servo power section covers 100W~0.75kW
四、Scenario advantages
1. Collaborative robots have innate advantages in lightweight load and range of motion, thanks to the modular design of joints, small volume and high integration, and the operating range far exceeds that of ordinary 6-joint robots
2. Installation and fixing are extremely simple, and the electric cabinet is only the size of the computer chassis
3. The standard EtherCAT protocol supports and is fully compatible with various customization requirements, such as controller online modification of SDO, support for feed-forward given robot dynamics models, etc
4. Support manual drag and drop teach, as well as anti-collision detection function
5. Support network FOE upgrade, one network cable can upgrade all series drivers
五、Device description EP3L-S
1. Voltage: DC 48V
2. Power: 0.1kW~0.75kW
3. Communication interface: EtherCAT, the minimum synchronization period is 125μs
4. Control mode: support CSP, CSV, CST, of which CSP mode is used as joint positioning, and CST mode is used as robot drag teaching
5. Support up to 23-bit multiturn absolute encoder
6. Direct current sampling technology, no need to isolate more compact design
7. High-performance ARM+FPGA is adopted, and the four-layer circuit board integrated design with high reliability has a higher degree of integration, higher reliability, lower cost, lower power consumption and smaller size















 Contact us
Contact us
 CRM system
CRM system
 Online service
Online service
 Official wechat
Official wechat

